城市NOA量产时代,真的来了!
L4自动驾驶公司纷纷下场,很多车企加速研发。如何打造性价比更高的城市NOA量产方案,不仅是行业的目标,也是大众消费者的期待。
作为世界前沿的无人驾驶通用解决方案公司,轻舟智航在今年5月发布了新一代车规级前装量产自动驾驶方案DBQ V4,专为城市NOA打造。在前不久的中国汽车蓝皮书论坛上,轻舟还进一步提出,用一颗激光雷达也可以实现城市NOA!性价比如此之高的方案,实战效果如何?背后又有何独门诀窍?今天,搭载DBQ V4,配备一颗前向120度激光雷达的轻舟自动驾驶车,正式来交卷!
从高架立交桥下路况恶劣的路口,到多车和大车混杂路况下的相互博弈,再到多层停车楼的清晰定位和连续过弯……不管场面多么惊心动魄,车辆都稳如老司机,过五关斩六将,不仅安全感满满,车感也十分舒适。
场景一:雨天行驶
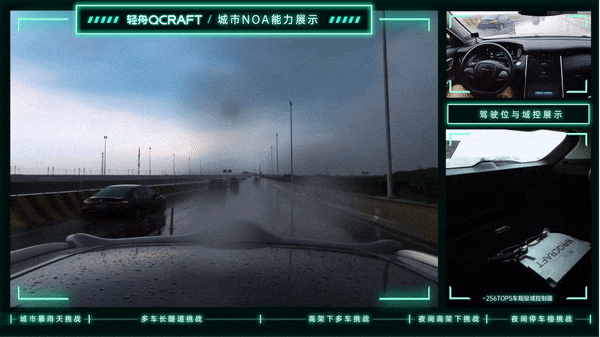
雨天湿滑,但车辆能平稳控制不打滑,道路水花水坑多,都未对车辆的视觉感知造成影响和误检。
场景二:夜间行驶,大车阻挡视野,对感知形成挑战

夜间光线弱+大车阻挡视野+高架下GNSS信号弱,三重压力下和大车相互博弈,完美躲闪。
场景三:绕行临停障碍车与变道超车

遇到前方车辆临停,能一边观察旁边车辆一边找到最佳时机换道,若发现前方车辆通行较慢,会灵活变道换道行驶。
场景四:交通参与者加塞、变道、别车

遇到其他交通参与者干扰自车行驶,能提前预见对方的行驶方向和速度,保持安全距离,合理避让,并再找准合适的时机快速通行。
场景五:人车混杂的交通路口
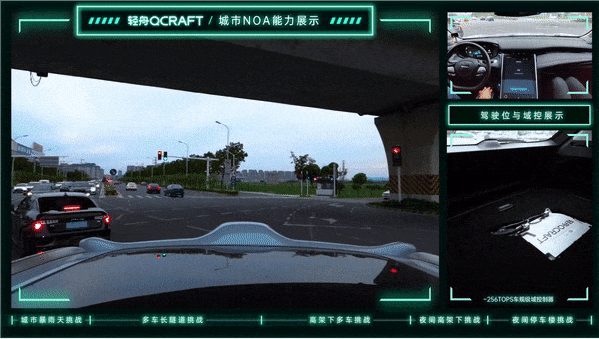
在复杂的路口,可精细感知和预判四面人车的动静状态,对“突袭”的人车迅速且平稳地做出反应,优先保障安全,同时兼顾舒适。
场景六:隧道行驶

在无GNSS信号的长隧道里凭借地图、感知和惯导,快速行驶通过。
场景七:停车楼行驶

夜晚多层停车楼中视野狭窄、光线昏暗,但车辆时刻清楚自己的定位,精确、平顺地连续过弯,并完成避让。上下坡速度车速自然,体感超越人类驾驶。
七大场景难题,各种Corner Case挑战,经过轻舟“调教”的城市NOA方案,能够用更高的边际收益,满足复杂城市环境下的应用能力。
那么问题来了——
为什么一颗前向120度激光雷达也可实现城市NOA?
在轻舟看来,首先,多加装一个激光雷达就需要更多算力支持,但在非重点区域增加更多激光雷达带来的边际收益并不高。凭借轻舟强大的视觉感知算法足以识别和判断侧向交通参与者的行为。
第二,在车行驶过程中,通过时序和空间融合算法,可以对前向激光雷达扫过的区域进行记忆,并在车往前行进后,将前向区域的点云数据,与侧向后向的纯视觉信息进行补充和融合。
第三,自车在向前移动时,道路上的潜在交互场景主要出现在自车正前及侧前方,使用120度激光雷达即足以处理绝大部分自车需要关心的复杂场景。倒车场景通常属于低速场景,无需依赖激光雷达也能良好完成。

与此同时,对于城市NOA来说,激光雷达也是必须的!
相较于高速NOA,城市NOA会面临更为复杂的场景和更多的长尾问题,物体辨认难度更高,且可能会遇到突然靠近自车的交通参与者,例如鬼探头等。而激光雷达能够提供精确的3D测距,可以及时捕捉准确物体的位置、形态、大小、运动状态等信息,便于自动驾驶系统及时做出更为安全且舒适的规避动作。
但以上只是一颗激光雷达实现城市NOA的理论基础。那么问题又来了!
用一颗激光雷达做好城市NOA,为什么是轻舟?
轻舟的“独门诀窍”,来自面面俱到的感知能力,更聪明的预测、规划和控制能力,以及更高效的数据闭环。
更可靠的感知能力,面面俱到、准确灵活,且效率高、成本低
轻舟拥有行业领先的多传感器穿插融合技术,可让感知模型在不同阶段利用不同传感器信息相互补充,从而得到更为准确的结果。多传感器的前中后融合,可以避免单模信息丢失,实现更早的多传感器信息共享,得到更优传感器融合结果,从而可以更准确更精细地感知动静态物体及状态信息,避免各类误检和漏检,精度高且鲁棒性强。
轻舟还通过半监督和自监督学习自动化建立数据闭环,可利用车辆收集和提取到的高价值数据,直接作用于算法提升,更快适应新城市和新场景,大大减少了繁琐的人工标注工作,拿到部分数据即可认知全新场景。特别是在行驶范围很广的量产车上,高效、低成本的优势会更加凸显。
轻舟还拥有强大的系统泛化能力,可以实现同一个模型无需任何定制化或针对硬件方案的重新训练,就能适配单到多个激光雷达的配置。同时对传感器安装位置、型号等标定相关配置泛化性强,可以快速适配不同车型。
更聪明的预测、规划和控制能力,打造最适应中国路况的“老司机”
轻舟自研的国内独家“时空联合规划算法”打破了业界常规的思维定势,同时考虑空间和时间来规划轨迹,而不是先单独求解路径,在路径基础上再求解速度从而形成轨迹。

相较于常规的“时空分离规划”方法,采用“时空联合规划”的车辆表现,可提前预判对向车辆的轨迹,把握好时机,灵活地绕行自行车,行车策略高效
这种策略让车辆在行驶时,能够比普通驾驶员甚至老司机“开得更好”,特别是在面临动态障碍物的交互时,能提前把握最好的时机,选出最佳行车轨迹,更流畅地完成车辆间的博弈,并且不会出现反复急刹的情况。不仅如此,在多车道行驶时,车辆还可以通过判断前方车流量和车速,灵活地变道选择更快的路线,而不会“死板地”跟着前车缓行。更聪明、更灵活,行车效率更高效。
更高效的数据闭环,以仿真为核心,提高技术的迭代效率
通过以仿真为核心的自动驾驶研发工具链“轻舟矩阵”,打通从数据处理、标注、训练、大规模仿真到技术输出的全流程,实现高效的数据流转和闭环验证,提高数据利用率和技术的迭代效率。
特别是在仿真系统中,每天可以抽取数百万帧有效数据,完成训练、测试验证和迭代优化,使得自动驾驶软件能力的进化不再受车辆和人员的限制。虚实结合的场景生成能力,不仅能以高复现率构建仿真场景,还可通过仿真智能体还原真实场景中交通参与者的交互能力,从而高效发现和解决问题。由此,就可对问题进行不断修复和训练,同时通过多维度评价指标的衡量,保证最终上车的算法可同时兼顾安全性和舒适性,并且良好地遵守交通法规。

在通往城市NOA量产之路上,轻舟始终主张“不堆料”,而是通过随“机”应变的配置方案,满足主机厂不同价位车型不同级别自动驾驶功能的量产需要。
凭借着全面的技术优势,轻舟可以在同样硬件成本下,满足更复杂的场景,从而在每个级别上都能提供性价比更高的方案,从而让更多用户享受到自动驾驶的技术红利,体验到这项技术带来的安全、便捷与乐趣!
欢迎到轻舟智航视频号欣赏轻舟自动驾驶车辆27公里无接管的一镜到底视频!